3 .复合式动量系统模型的结构推演及特性分析
3.1 模型一( 动量系统初始模型)
首先构建一个简单的动量系统模型,推导分析其运转机理。
如图 1 所示,在没有任何力场作用( 模拟零重力环境) 的三维坐标系中,质量为 mA的物体 A 上有两处可旋转的轴 a1、a2,且 a1、a2各自连接一个连杆的中点。这两个连杆大小形状完全相同,质量忽略不计,且对称于线段 a1a2的垂直平分面,并以相对该平面镜像运动的形式做匀速半周期旋转运动,即每个连杆旋转 180°( 该过程速度较慢) 。每个连杆的两端分别固定两个物体,物体分别为 B1、B2、1、C2,质量分别为 mB1、mB2、mC1、mC2,其中 mB1= mB2=mC1= mC2,物体 B1、B2、C1、C2到各自连杆中心点的距离均相等。该体系中物体 A 为质量均匀的长方体,B1、B2、C1、C2均为球体,且质量、密度、体积完全相同。x、y、z 分别为环境坐标系的 3 个方向,x 轴为水平方向,y 轴为竖直方向,z 轴为垂直纸面方向。
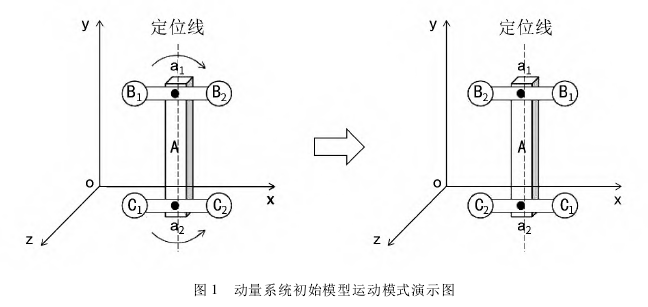
图 1 中,假设两个对称连杆的旋转扭矩为恒量T1、T2,并且 T1、T2大小相等方向相反。由于每个连杆两端固定的物体质量均相等,且物体到各自连杆中点的距离( 力臂) 均相等,所以可假设等效到物体B1、B2、C1、C2上的推力均等于 F,物体 B1、B2、C1、C2相对于物体 A 的移动速度均等于 v,进而可推断该动量系统在每个坐标轴的动量变化。
x 轴: 在图 1 视野内物体 B1、C1相对于物体 A以速度 Vx向右运动,物体 B2、C2相对于物体 A 以速度 Vx向左运动,由于 B1、B2、C1、C2的质量均相等,且 B1与 C1,B2与 C2
均为相对物体 A 等力臂镜像运动,因此 x 轴方向上 B1、C1与 B2、C2的动量之和为零。又因为在 x 轴方向上等效到物体 B1、B2、C1、C2上的推力均等于 Fx,且推力的作用时间均相等,所以 x 轴方向上 B1、C1与 B2、C2的冲量之和也为零。根据动量守恒定律,在该动量系统运动过程中,物体 A 在 x 轴方向上保持静止,没有运动轨迹。

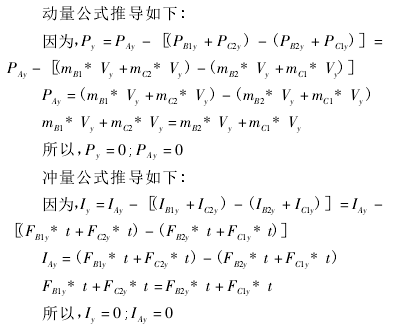
y 轴: 在图 1 视野内,物体 B1、C2相对于物体 A以速度 Vy向上运动,物体 B2、C1相对于物体 A 以速度 Vy向下运动,由于 B1、B2、C1、C2的质量均相等,且 B1与 C1,B2与 C2均为相对物体 A 等力臂镜像运动,因此 y 轴方向上 B1、C2与 B2、C1的动量之和为零。又因为在 y 轴方向上等效到物体 B1、B2、C1、C2上的推力均等于 Fy,且推力的作用时间均相等,所以 y 轴方向上 B1、C2与 B2、C1的冲量之和也为零。根据动量守恒定律,在该动量系统运动过程中,物体 A 在 y 轴方向上保持静止,没有运动轨迹。

z 轴: 由于该动量系统内的所有物体在 z 轴方向上没有相对运动,因此 z 轴方向上所有物体的动量之和与冲量之和均为零。考虑到该动量系统中连杆圆周运动的速度较慢,其角动量系统带来的微弱回转效应可忽略不计。根据动量守恒定律,在该动量系统运动过程中,物体 A、B1、B2、C1、C2在 z 轴方向上没有运动轨迹。

即该动量系统遵循动量守恒定律,整个运动过程中系统的动量和与冲量和均为零。其中,物体 A在该过程中相对于环境坐标系保持静止不动,没有任何方向上的运动轨迹。
3.2 模型二( 复合式动量系统初始模型)
在上述动量系统模型的基础上,加入多个角动量系统,构成复合式动量系统的初始模型,推导分析其运转机理。如图 2 所示,在模型一的基础上将物体 B1、B2、C1、C2替换为质量、密度、体积、形状、形式完全相同的陀螺仪,质量关系分别为 mB1= mB2= mC1= mC2。并且陀螺仪 B1、B2、C1、C2在整个系统运动过程中保持高速旋转状态,旋转速度为匀速恒定,且陀螺仪B1、C1的旋转方向相互对称。因此由陀螺仪旋转反作用力产生的系统反转运动相互抵消,陀螺仪自身的回转效应也一并抵消。此外,当连杆旋转到平行于 y 轴位置时,陀螺仪 B1、C1将处于短时同向旋转状态,其旋转反作用力导致的系统小范围反转运动这里忽略不计。即系统在整个过程中不因陀螺仪B1、C1旋转而发生偏转。陀螺仪 B2、C2在整个系统运动过程中没有外在力矩使其转子旋转,即转子相对陀螺仪保持静止状态。
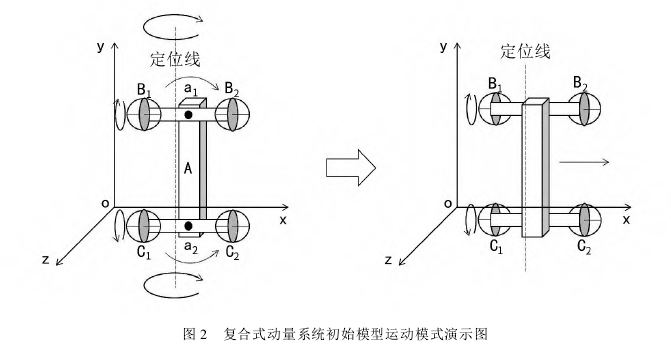
据陀螺仪高速旋转时的定轴性可知,在力臂相等的情况下,改变高速旋转陀螺仪的轴向角度需要克服陀螺仪自身产生的反抗力矩,即科里奥利力的矩。所以,在该模型中,连杆施加在旋转陀螺仪上的力矩要大于施加在不旋转陀螺仪上的力矩。因此等效在陀螺仪 B1、B2、C1、C2上的推力关系分别为 FB1> FB2,FB1= FC1,FB2= FC2。陀螺仪 B1、B2、C1、C2相对于物体 A 的移动速度均等于 V。进而可推断该动量系统在每个坐标轴的动量变化。
x 轴: 在图 2 视野内陀螺仪 B1、C1相对于物体 A以速度 Vx向右运动,陀螺仪 B2、C2相对于物体 A 以速度 Vx向左运动,由于 B1、B2、C1、C2的质量均相等,且 B1与 C1,B2与 C2均为相对物体 A 等力臂镜像运动。因此 x 轴方向上 B1、C1与 B2、C2的动量之和为零。又因为在 x 轴方向上 B1、B2、C1、C2上的推力关系分别为 FB1x> FB2x,FC1x> FC2x,且推力的作用时间均相等,所以 x 轴方向上 B1、C1与 B2、C2的冲量之和为两组不同方向作用力的冲量差。根据动量守恒定律,该冲量差会以反作用力的形式通过连杆转化为物体 A 在 x 轴方向上的动量,以此达到平衡。由于 x 轴方向上 B1、C1与 B2、C2的动量之和为零,因此物体 A 获得的动量可以等效为整个系统在x 轴方向上获得的动量,即在 x 轴方向上系统冲量和为零,但系统动量和不为零。
上述情况在一般动量系统是很少见的,这也是引用复合式动量系统分析的原因。在这种情况下,系统可能会相对空间坐标系发生轴向偏转,因此模型二中的 x 轴应该为系统自身坐标轴,即该轴随系统自身偏转而偏转。根据动量守恒定律,该过程中整个系统将在系统坐标系 x 轴方向上获得一定动量,且在该轴方向上系统的冲量和为零,即整个系统以速度 Vx'沿 x 轴方向向左移动。

y 轴: 在图 2 视野内陀螺仪 B1、C2相对于物体 A以速度 Vy向上运动,陀螺仪 B2、C1相对于物体 A 以速度 Vy向下运动,由于 B1、B2、C1、C2的质量均相等,且 B1与 C1,B2与 C2均为相对物体 A 等力臂镜像运动。因此 y 轴方向上 B1、C2与 B2、C1的动量之和为零。又因为在 y 轴方向上 B1、B2、C1、C2上的推力关系分别为 FB1y= FC1y,FB2y= FC2y,且推力的作用时间均相等,所以 y 轴方向上 B1、C2与 B2、C1的冲量之和也为零。根据动量守恒定律,在该动量系统运动过程中,物体 A 在 y 轴方向上保持静止,没有运动轨迹。
z 轴: 虽然该动量系统内的所有物体在 z 轴方向上没有相对运动,但根据陀螺仪高速旋转时的进动性可知,高速旋转的陀螺仪在 x 轴方向上受外力 F作用时,会在其 z 轴方向上产生进动效果。由于两个陀螺仪的旋转方向相互对称,所以其进动力矩的方向是一致的,这里假设该进动方向为平行于 z 轴指向纸面。
由于陀螺仪与连杆之间为刚性连接,因此陀螺仪发生进动时,不会以连接点为基点旋转,而是带动整个系统相对于 z 轴做顺时针偏转运动( 如图 2所示) 。这里所说的 z 轴为环境坐标轴,即该轴不随系统自身偏转而偏转。这也是之前系统坐标系中 x轴方向上系统动量不为零的原因,即系统坐标系 x轴方向上的系统动量是通过环境坐标系 z 轴方向上系统获得的偏转动量的反作用力生成的,从而达到系统整体的动量平衡。
根据系统运动过程中,陀螺仪进动方向变化分析可知,连杆动作周期前半程物体 A 及整个系统相对 z 轴做加速偏转运动,连杆动作周期后半程物体A 及整个系统相对 z 轴做减速偏转运动。这里设定陀螺仪 B1、C1的进动力大小为 Fz,系统自身的转速为 Vz',因此在 z
轴方向上整个系统的偏转动量和不为零。根据陀螺仪在系统运动过程中移动位置的调整可知,陀螺仪在连杆运动前半周期与后半周期相对 z 轴的进动力方向完全相反,因此该系统的偏转冲量和为零。考虑到该动量系统中连杆圆周运动速度较慢,其角动量系统带来的微弱回转效应可忽略不计。根据动量守恒定律,在该动量系统运动过程中,系统整体在动作周期前半程相对 z 轴做顺时针加速偏转运动,在动作周期后半程相对 z 轴做顺时针减速偏转运动,在不计动量损耗的前提下,系统最终偏转速度将降为 0,整体停止转动。
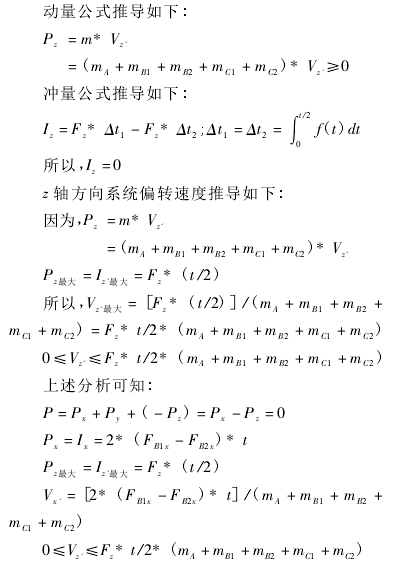
即该动量系统遵循动量守恒定律,整个运动过程中系统相对于环境坐标系 z 轴以速度 Vz'做变速偏转运动,速度范围为 0≤Vz'≤Fz* t /2* ( mA+ mB1+ mB2+ mC1+ mC2) ; 此外,该系统沿自身坐标系 x 轴方向向左移动,移动中产生的动量值为 2* ( FB1x-FB2x) * t,冲量值为 0。系统最终沿该方向以恒定速度 Vx'运动,速度值为: [2* ( FB1x- FB2x) * t]/( mA+mB1+ mB2+ mC1+ mC2) 。整个系统相对环境坐标系的运动情况可参考图 2 中定位线的相对位置变化及箭头标注方向。
|

