4 .复合式动量系统的特定结构模型及特性分析
4.1 模型三( 复合式动量系统特定模型)
在上述动量系统模型二的基础上做镜像叠加处理,构成复合式动量系统的最终研究模型,即特定模型。推导分析其运转机理。如图 3 所示,在模型二的基础上,在所有运转条件都不改变的前提下,将该模型相对平面 xoy( 平面 xoy 为系统自身坐标系 x 轴、y 轴所在平面)构建结构与运动模式完全对称的镜像模型,并将新构建模型与原有模型有机地结合在一起,形成一个全新的模型结构,即为模型三。
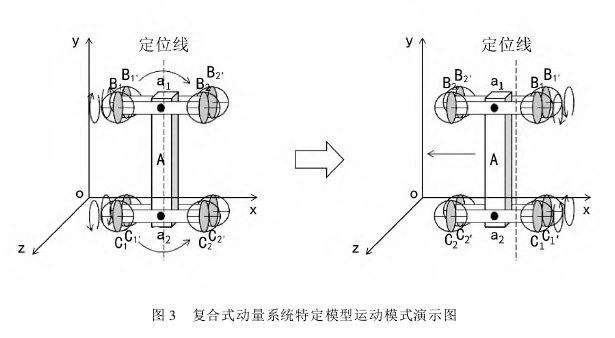
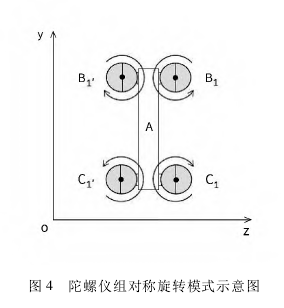
该模型中对称结构的运动形式及周期与模型二完全一致,即陀螺仪 B1、B2、C1、C2与镜像陀螺仪B1'、B2'、C1'、C2',原有模型连杆与镜像模型连杆在相对物体 A 运动的过程中彼此相对静止,整个过程中陀螺仪 B1、C1与镜像陀螺仪 B1'、C1'转子高速旋转,旋转方向为两两对称( 如图 4 所示) ,陀螺仪 B2、C2与镜像陀螺仪 B2'、C2'转子相对陀螺仪保持静止状态。进而可推断该动量系统在每个坐标轴的动量变化。
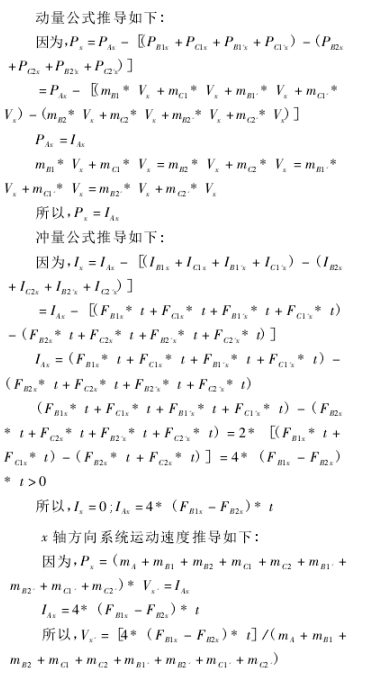
x 轴: 在图 3 视野内,陀螺仪 B1、C1、B1'、C1'相对于物体 A 以速度 Vx向右运动,陀螺仪 B2、C2、B2'、C2'相对于物体 A 以速度 Vx向左运动,由于 B1、B2、C1、C2、B1'、B2'、C1'、C2'的质量均相等,且 B1与 C1,B2与 C2; B1'与 C1',B2'与 C2'均为相对物体 A 等力臂镜像运动。因此 x 轴方向上,B1、C1与 B2、C2,B1'、C1'与 B2'、C2'的动量之和均为零。又因为在 x 轴方向上,B1、B2、C1、C2、B1'、B2'、C1'、C2'上的推力关系分别为 FB1x> FB2x,FC1x> FC2x; FB1'x> FB2'x,FC1'x> FC2'x;FB1x= FC1x= FB1'x= FC1'x,FB2x= FC2x= FB2'x= FC2'x,且推力的作用时间均相等,所以 x 轴方向上,B1、C1与B2、C2; B1'、C1'与 B2'、C2'的冲量之和均相等且大小为两组不同方向作用力的冲量差。根据动量守恒定律,这两组冲量差之和会以反作用力的形式通过连杆转化为物体 A 在 x 轴方向上的动量,以此达到平衡。与模型二一样,物体 A 获得的动量可以等效为整个系统在 x 轴方向上获得的动量,即在 x 轴方向上系统冲量和为零,但系统动量和不为零。与模型二不同的是,模型三在 z 轴上特殊的镜像结构会将模型二发生的相对空间坐标系偏转现象完全抵消掉,即整个过程中系统相对 z 轴不发生偏转运动。根据动量守恒定律,该过程中整个系统将在环境坐标系 x 轴方向上获得一定动量,且在该轴方向上系统的冲量和为零,即整个系统以速度 Vx'沿 x 轴方向向左移动。
y 轴: 在图 3 视野内,陀螺仪 B1、C2、B1'、C2'相对于物体 A 以速度 Vy向上运动,陀螺仪 B2、C1、B2'、C1'相对于物体 A 以速度 Vy向下运动。由于 B1、B2、C1、C2、B1'、B2'、C1'、C2'的质量均相等,且 B1与 C1,B2与 C2; B1'与 C1',B2'与 C2'均为相对物体 A 等力臂镜像运动,因此,y 轴方向上 B1、C2与 B2、C1; B1'、C2'与B2'、C1'的动量之和均为零。又因为在 y 轴方向上B1、B2、C1、C2、B1'、B2'、C1'、C2'上的推力关系分别为FB1y= FC1y= FB1'y= FC1'y,FB2y= FC2y= FB2'y= FC2'y,且推力的作用时间均相等,所以 y 轴方向上 B1、C2与B2、C1,B1'、C2'与 B2'、C1'的冲量之和也均为零。根据动量守恒定律,在该动量系统运动过程中,物体 A在 y 轴方向上保持静止,没有运动轨迹。
z 轴: 由于该动量系统内的所有物体在 z 轴方向上没有相对运动,并且模型三特殊的镜像结构会将两组高速旋转陀螺仪在 z 轴方向上产生的进动力矩相互抵消,主要原因也在于陀螺仪旋转方向为两两对称的形式,进而使得原有模型陀螺仪与镜像模型陀螺仪在随各自连杆移动过程中所产生的进动力相互抵消,即整个过程中陀螺仪进动力合力为零。因此,z 轴方向上所有物体的动量之和与冲量之和均为零。考虑到该动量系统中连杆圆周运动速度较慢,其角动量系统带来的微弱回转效应可忽略不计。根据动量守恒定律,在该动量系统运动过程中,物体 A、B1、B2、C1、C2、B1'、B2'、C1'、C2'在 z 轴方向上没有运动轨迹。

即该动量系统在系统不受外力作用的前提下,在每个坐标轴均遵循动量守恒定律的情况下,在 x轴方向上产生了一定的动量,该系统最终的运动形式为沿环境坐标系 x 轴方向向左移动,移动中产生的动量值为 4* ( FB1x- FB2x) * t,冲量值为 0。系统最终沿该方向以恒定速度 Vx'移动,速度值为[4*( FB1x- FB2x) * t]/( mA+ mB1+ mB2+ mC1+ mC2+mB1'+ mB2'+ mC1'+ mC2') 。整个系统相对环境坐标系的运动情况可参考图 3 中定位线的相对位置变化及箭头标注方向。

4. 2 关于模型三存在的问题分析
在上述分析的基础上,进一步分析这单一轴向上多出来的动量来自于哪里。上文自始至终没有提到维持连杆低速旋转以及陀螺仪高速旋转的动力来源,假设该结构中装有相应功率的电动机使其运转,下面分别分析连杆与陀螺仪旋转时反向扭矩对系统的影响。首先看一下连杆的影响。在模型三的空间结构中,原模型二中的两个连杆以镜像运动的模式对称旋转,因此两个连杆的旋转反作用力对于整个系统相互抵消; 同理,在模型三的镜像模型结构中,两个连杆的旋转反作用力对于整个系统也是相互抵消的。即模型三中所有连杆运动所产生的反作用力矩相互抵消,其合力矩为零,对整个系统不产生影响。接下来看一下陀螺仪的影响。上文提到,陀螺仪的旋转方向为两两对称的形式,因此陀螺仪旋转产生的反作用力对于整个系统相互抵消,即在该过程中,系统不发生任何方向偏转。同样由于模型三特殊的镜像结构,陀螺仪随连杆移动时所产生的进动力对于整个系统也相互抵消,进动力的反作用力也以相互抵消的方式维持了系统的动态平衡,即模型三中所有因陀螺仪旋转所产生的反作用力矩相互抵消; 所有因陀螺仪进动所产生的反作用力矩相互抵消; 所有陀螺仪自身的回转效应也一并抵消。在整个过程中,系统的运转不受这些力及力矩的影响。
所以,影响系统的只有连杆迫使高速旋转陀螺仪改变轴向角度时,由陀螺仪定轴性引起的反抗力矩。该力矩生成了科里奥利力,该力通过连杆作用于整个系统,使整个系统在单一轴向上产生了动量。
上述复合式动量系统与常规动量系统比较,结构独特、动量关系复杂、动量特性更是超出常理,其中作者对角动量系统的研究也只是处于基础理论阶段,没有更深层次的见解,这也可能导致作者在分析过程中,没有考虑到特殊环节上的力学特性及叠加效果,进而得出了错误的结论。在此欢迎广大专家学者指点、批评。
换言之,如果上述模型推导结论正确,那么复合式动量系统将会是一个极为特殊的动量系统。该系统在某种意义上改变了人们一直沿用至今的动量守恒定律,通过该系统的运作机理,可以拓宽已有的技术领域,研制出更为先进的工具及系统。例如在无重力、无摩擦力环境下的动力系统,或者外太空环境下的类光速空间飞行器、仿重力空间飞行器等。
5. 结 论
( 1) 在本文所述理论分析成立的前提下,复合式动量系统可通过常规动量系统与角动量系统相结合的方式,达到整体运转过程中两种系统动量特性相互复合的效果,进而形成该系统特有的动量特性,即复合式动量特性。
( 2) 在本文所述理论分析成立的前提下,复合式动量系统以其独特的空间镜像结构,将自身角动量系统的轴向进动力矩相互抵消,从而通过科里奥利力生成单一轴向上的系统动量,进而达到了通过系统内力改变系统整体动量的效果。
( 3) 复合式动量系统的实际动量特性可能与本文分析的结论有所出入,还有待日后专家学者们的参与讨论,以确定该系统的实际动量特性。
( 4) 如果复合式动量系统( 多体系动量系统) 的实际动量特性与本文推导的结论一致,那么与该系统相关的应用将会促进很多技术上的创新与发展。
|

